Bmm150 - Magnetometer
The Bmm150 is a magnetometer that can be controlled either thru I2C either thru SPI. This implementation was tested in a ESP32 platform, specificaly in a M5Stack Gray.
Documentation
Documentation for the Bmm150 can be found here
Usage
Important: make sure you properly setup the I2C pins especially for ESP32 before creating the I2cDevice, make sure you install the nanoFramework.Hardware.ESP32 nuget:
//////////////////////////////////////////////////////////////////////
// when connecting to an ESP32 device, need to configure the I2C GPIOs
// used for the bus
Configuration.SetPinFunction(21, DeviceFunction.I2C1_DATA);
Configuration.SetPinFunction(22, DeviceFunction.I2C1_CLOCK);
For other devices like STM32, please make sure you're using the preset pins for the I2C bus you want to use.
You can find an example in the sample directory. Usage is straight forward including the possibility to have a calibration.
// The I2C pins 21 and 22 in the sample below are ESP32 specific and may differ from other platforms.
// Please double check your device datasheet.
Configuration.SetPinFunction(22, DeviceFunction.I2C1_CLOCK);
Configuration.SetPinFunction(21, DeviceFunction.I2C1_DATA);
I2cConnectionSettings mpui2CConnectionSettingmpus = new(1, Bmm150.DefaultI2cAddress);
using Bmm150 bmm150 = new Bmm150(I2cDevice.Create(mpui2CConnectionSettingmpus));
Debug.WriteLine($"Please move your device in all directions...");
bmm150.CalibrateMagnetometer();
Debug.WriteLine($"Calibration completed.");
while (true)
{
Vector3 magne = bmm150.ReadMagnetometer(true, TimeSpan.FromMilliseconds(11));
var head_dir = Math.Atan2(magne.X, magne.Y) * 180.0 / Math.PI;
Debug.WriteLine($"Mag data: X={magne.X,15}, Y={magne.Y,15}, Z={magne.Z,15}, head_dir: {head_dir}");
Thread.Sleep(100);
}
Expected output
Please move your device in all directions...
Calibration completed.
Mag data: X= 32.97089767, Y= -10.99029922, Z= -27.41439819, head_dir: 108.43494945
Mag data: X= 38.83239364, Y= -10.62395668, Z= -22.2116661, head_dir: 105.30084201
Mag data: X= 43.96039581, Y= -8.4257431, Z= 4.60182046, head_dir: 100.85010634
Mag data: X= 42.49582672, Y= -8.059553146, Z= 9.0047292709, head_dir: 100.7388972
Mag data: X= 42.86371994, Y= -12.8224802, Z= 8.20643711, head_dir: 106.65430547
Mag data: X= 36.26864242, Y= -6.22794914, Z= -21.41402244, head_dir: 99.74364301
Mag data: X= 29.30693054, Y= -9.89108943, Z= -32.21274185, head_dir: 108.6495335
Mag data: X= 15.75333309, Y= -8.42620182, Z= -37.029045104, head_dir: 118.14159082
Mag data: X= 4.7626357, Y= -6.22806167, Z= -42.23312759, head_dir: 142.59463794
Mag data: X= -4.39627885, Y= -6.59441852, Z= -36.22841644, head_dir: -146.309933
Mag data: X= -10.25779819, Y= -5.12889909, Z= -38.62528991, head_dir: -116.56504656
Mag data: X= -19.050889968, Y= 0.73272651, Z= -37.033847808, head_dir: -87.7974031
Mag data: X= -35.90294647, Y= 1.46542632, Z= -18.61460113, head_dir: -87.66269127
Mag data: X= -37.73472976, Y= 8.42620182, Z= -13.41051959, head_dir: -77.41230537
Mag data: X= -37.73472976, Y= 9.52527141, Z= -12.20957756, head_dir: -75.83294707
Mag data: X= -18.31749725, Y= 0.73269987, Z= -31.42057418, head_dir: -87.70938928
Mag data: X= -2.19813942, Y= -7.69348812, Z= -37.029045104, head_dir: -164.054600542
Calibration
You can get access perfom calibration thru the CalibrateMagnetometer function which will. Be aware that the calibration takes a few seconds.
bmm150.CalibrateMagnetometer();
If no calibration is performed, you will get a raw data cloud which looks like this:
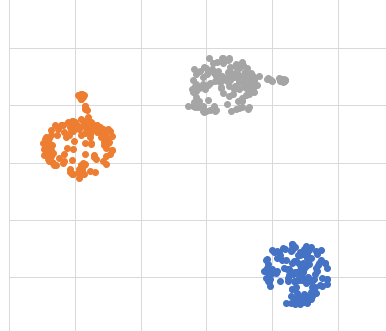
Running the calibration properly require to move the sensor in all the possible directions while performing the calibration. You should consider running it with enough samples, at least few hundreds. The default is set to 100. While moving the sensor in all direction, far from any magnetic field, you will get the previous clouds. Calculating the average from those clouds and subtracting it from the read value will give you a centered cloud of data like this:
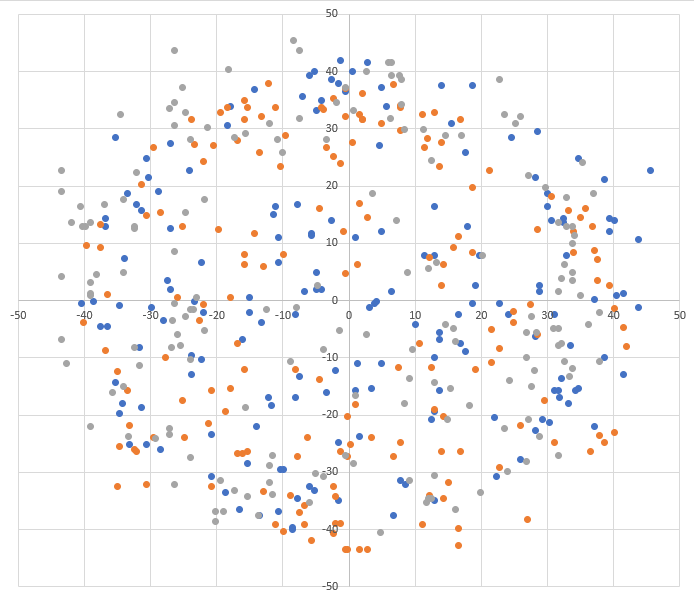
To create those cloud point graphs, every cloud is a coordinate of X-Y, Y-Z and Z-X.
Once the calibration is done, you will be able to read the data with the bias corrected using the ReadMagnetometer function. You will still be able to read the data without any calibration using the ReadMagnetometerWithoutCalibration function.
Not supported/implemented features of the Bmm150
- Device Self-Tests
- Device Reset
- Toggle operation modes (defaults to normal mode)
Testing
Unit tests project is in \Bmm150.tests. You can use VS2019 built-in test capabilites as follows:
[TestMethod]
public void TestCompensateVector3()
{
uint rhall = 42;
Vector3 rawMagnetormeterData = new Vector3 { X = 13.91375923, Y = -28.74289894, Z = 10.16711997 };
Bmm150TrimRegisterData trimRegisterData = new Bmm150TrimRegisterData()
{
DigX1 = 0,
DigX2 = 26,
DigXy1 = 29,
DigXy2 = -3,
DigXyz1 = 7053,
DigY1 = 0,
DigY2 = 26,
DigZ1 = 24747,
DigZ2 = 763,
DigZ3 = 0,
DigZ4 = 0
};
double x = Bmm150Compensation.CompensateX(rawMagnetormeterData.X, rhall, trimRegisterData);
double y = Bmm150Compensation.CompensateY(rawMagnetormeterData.Y, rhall, trimRegisterData);
double z = Bmm150Compensation.CompensateZ(rawMagnetormeterData.Z, rhall, trimRegisterData);
// Calculated value should be: -1549.91882323
Assert.Equal(Math.Ceiling(x), Math.Ceiling(-1549.918823), "Unexpected x-axis value.");
// Calculated value should be: 3201.80615234
Assert.Equal(Math.Ceiling(y), Math.Ceiling(3201.80615234), "Unexpected y-axis value.");
// Calculated value should be: 26.20077896
Assert.Equal(Math.Ceiling(z), Math.Ceiling(26.20077896), "Unexpected z-axis value.");
}
Notes
- The BMI160 embedd this BMM150.