DC Motor Controller
This is a generic class to control any DC motor.
DC motors are controlled by simply providing voltage on the inputs (inverted voltage inverts the direction).
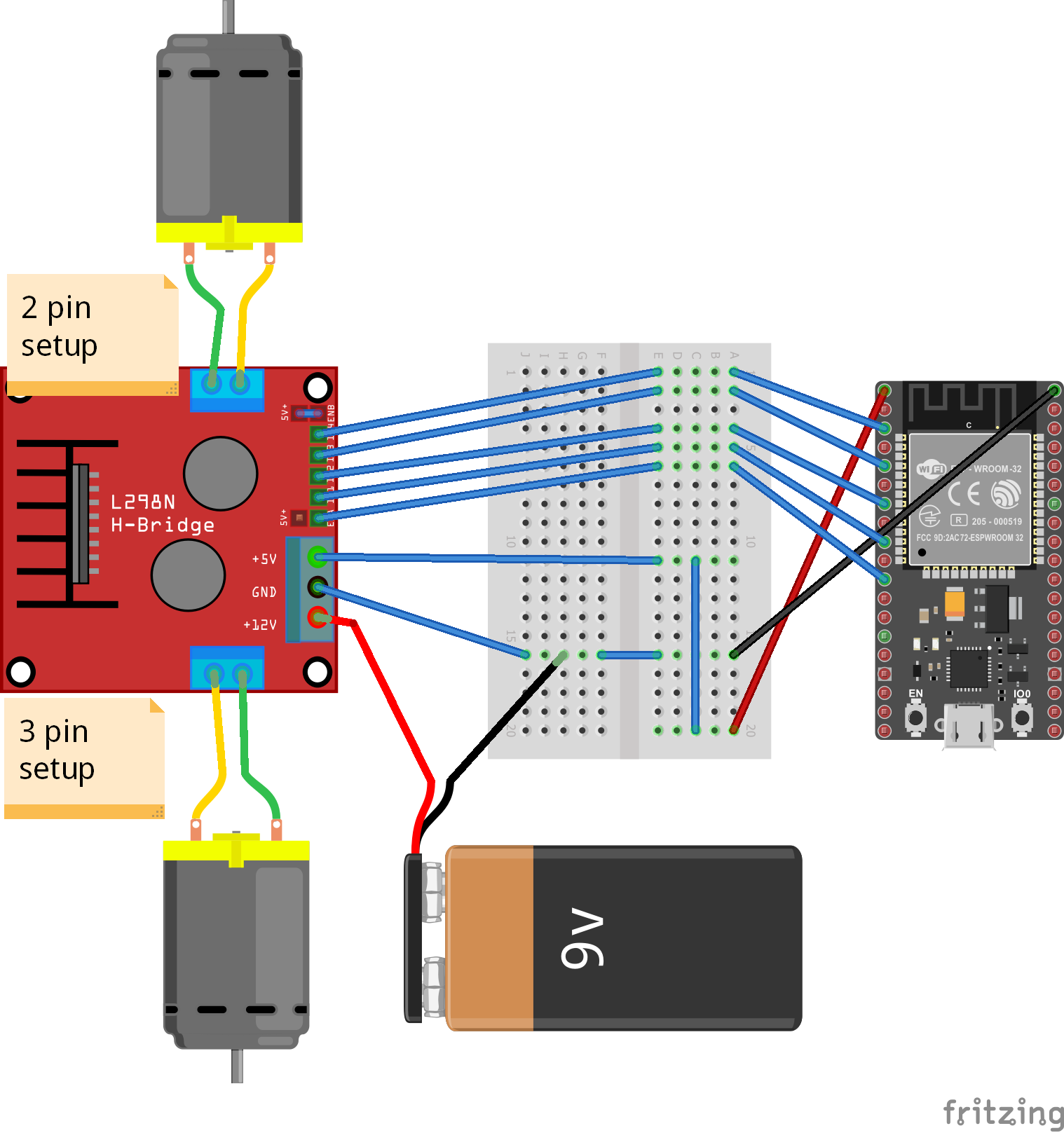
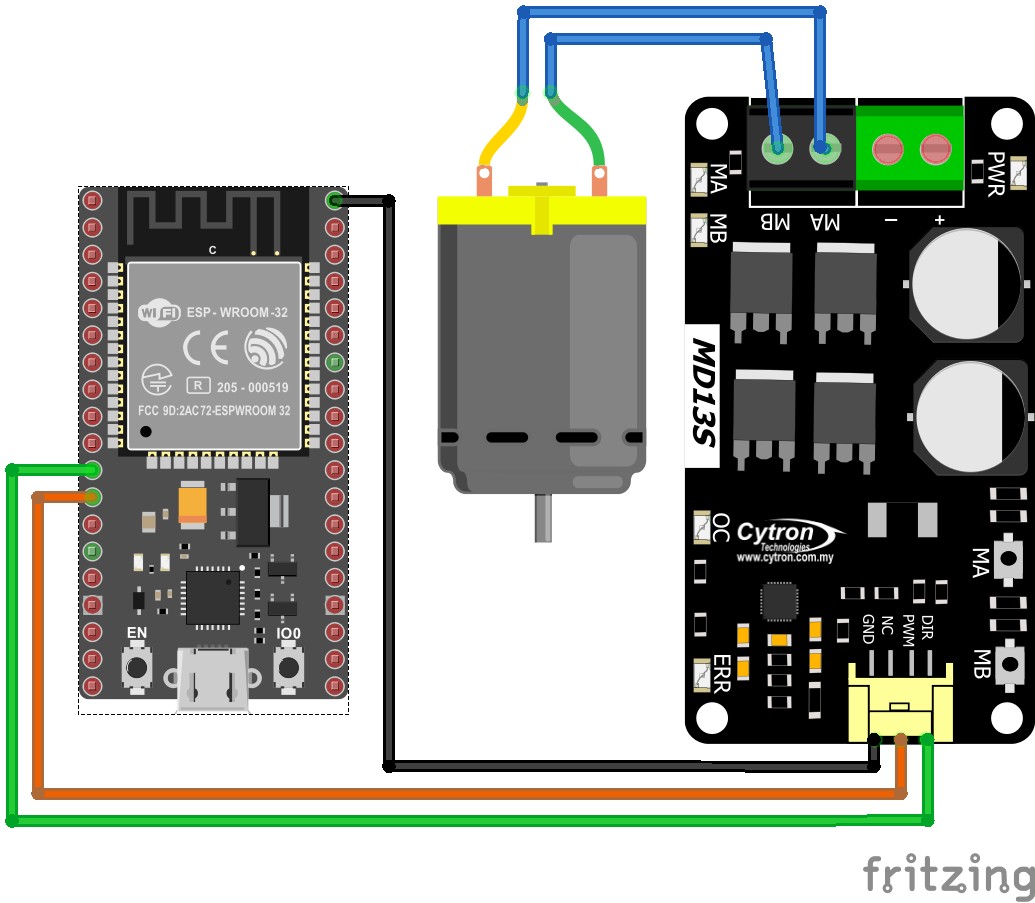
DC motors can be controlled with 1, 2 or 3 pins. Please refer to the sample to see how to connect it.
Never connect DC motor directly to your board, instead use i.e. H-bridge
3- vs 1/2-pin mode
2/1-pin mode should be used only if H-bridge allows the inputs to be changed frequently otherwise excessive heat or damage may occur which may reduce life-time of the H-bridge. It may also cause increased energy consumption due to energy being converted into heat.
Usage
See full sample for more details.
static void Main(string[] args)
{
const double Period = 10.0;
Stopwatch sw = Stopwatch.StartNew();
// 1 pin mode
// using (DCMotor motor = DCMotor.Create(6))
// using (DCMotor motor = DCMotor.Create(PwmChannel.Create(0, 0, frequency: 50)))
// 2 pin mode
// using (DCMotor motor = DCMotor.Create(27, 22))
// using (DCMotor motor = DCMotor.Create(new SoftwarePwmChannel(27, frequency: 50), 22))
// 2 pin mode with BiDirectional Pin
// using (DCMotor motor = DCMotor.Create(19, 26, null, true, true))
// using (DCMotor motor = DCMotor.Create(PwmChannel.Create(0, 1, 100, 0.0), 26, null, true, true))
// 3 pin mode
// using (DCMotor motor = DCMotor.Create(PwmChannel.Create(0, 0, frequency: 50), 23, 24))
// Start Stop mode - wrapper with additional methods to disable/enable output regardless of the Speed value
// using (DCMotorWithStartStop motor = new DCMotorWithStartStop(DCMotor.Create( _any version above_ )))
using (DCMotor motor = DCMotor.Create(6, 27, 22))
{
bool done = false;
string lastSpeedDisp = null;
while (!done)
{
double time = sw.ElapsedMilliseconds / 1000.0;
// Note: range is from -1 .. 1 (for 1 pin setup 0 .. 1)
motor.Speed = Math.Sin(2.0 * Math.PI * time / Period);
string disp = $"Speed = {motor.Speed:0.00}";
if (disp != lastSpeedDisp)
{
lastSpeedDisp = disp;
Debug.WriteLine(disp);
}
Thread.Sleep(1);
}
}
}